Etusivu › Foorumit › Yleistä keskustelua › Kerro mitä komponentteja robotissasi on.
Tämmönen vinkki ketju jossa halukkaat kisaajat kertovat robonsa komponenteista ja miksi ne valittiin robottiin. Tavoitteena olisi että aloittelija ja kokeneemmatkin kisaajat voisivat käyttää näitä vinkkeinä.
EE-robot
Tässä osalistaa ja osien selityksiä PDF muodossa
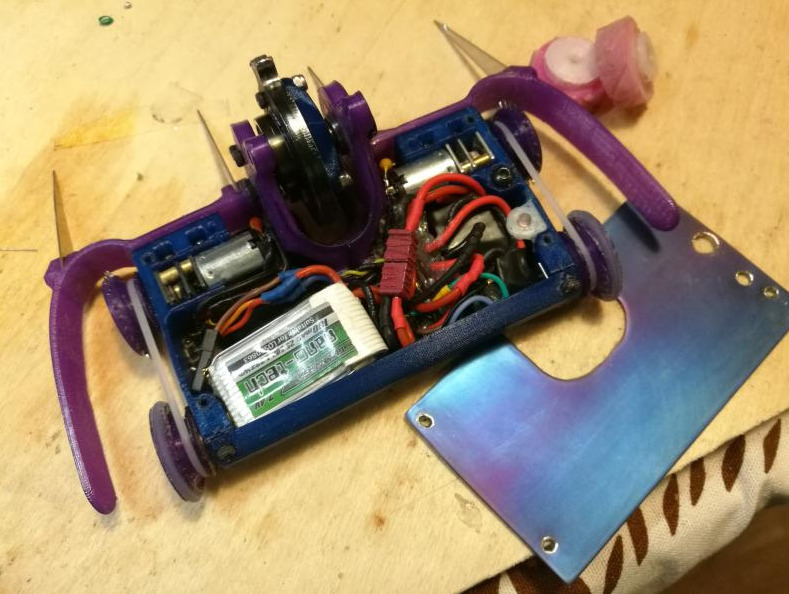
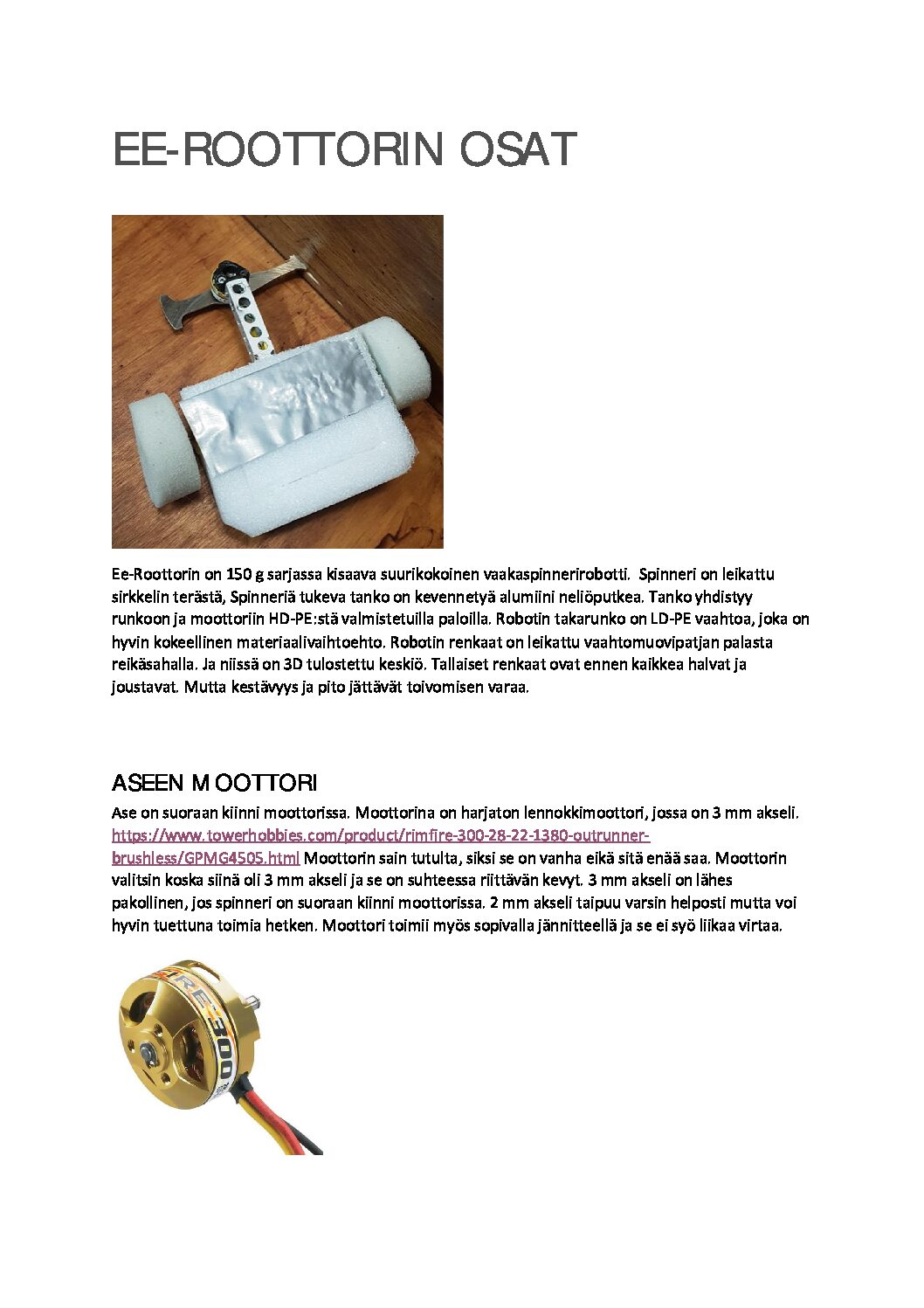
Ultra Pink 150g
– 3D-printatut osat Taulman Bridge nylon, pohja 1mm hiilikuitulevyä ja 0.5mm grade 5 titaanikatto. Osat kiinni M2 ruuveilla. Piikit 0.5mm jousiterästä leikattu tasoituslastasta.
– 2x N20 moottorit, hieman modattu roottoria vaihtamalla tiukemmat 3V käämit. Lähettimestä rajoitettu kaasua, että moottoreita ajetaan vain 5V max (50000rpm). Muuten tulee sauhut. Moottorit stallaa ~3A virralla ja vääntää aika hurjasti.
– 30A Spedix drone noparit, jotka on ohjelmoitu harjallisten moottorien ohjaamiseen. Ei tarvis olla noin jykevät mut pienempiä ei löydy tietyllä prossulla.
– Spinnerin nopeudensäädin EMAX Bullet 30A. Ohjelmoitu pyörittää spinneriä molempiin suuntiin, moottorijarru päällä. Takaperin pyöriessä robo heittää itsensä ympäri, jos se on jäänyt katolleen.
– Vastaanotin FrSky RX4R
– 2S 180mAh Nano-Tec lipo
– Micro Deans virtaliittimet, 10A
– Itsetehty ruuvivirtakytkin kahdesta M3 neliömutterista poraamalla toisesta kierteet.
– Spinnerin moottori Rcinpower SmooX Plus 1507 – 2680KV, 3mm sisäinen akseli.
– Hardox 400 laserleikattu 45mm spinneri, 15g
– Silikonirenkaat on tehty kylppärisilikonilla 3d-printattuun muottiin. Piikkiirenkaat on tehty nuppineuloista. Molemmissa 3d-printattu keskiö.
– Silikoniset o-renkaat välittää vedon takapyöriin.
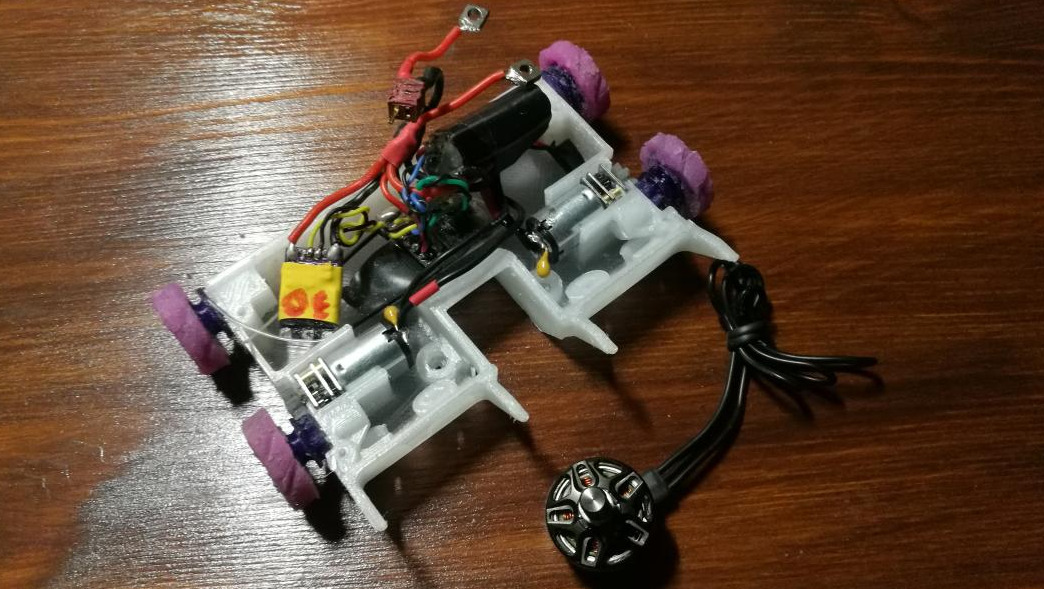
Hot Pink 450g
– 3D-printatut osat Taulman Bridge nylon, pohja 0.5mm grade 5 titaania. Spinnerin päällä oleva ”spoileri” 1mm hiilikuitua. Osat kiinni M2/M3 ruuveilla.
– 4x N30 moottorit, vääntää vähän enemmän kuin N20 moottorit.
– 30A Spedix drone noparit, jotka on ohjelmoitu harjallisten moottorien ohjaamiseen. Ei tarvis olla noin jykevät mut pienempiä ei löydy tietyllä prossulla.
– Spinnerin nopeudensäädin 30A Spedix. Ohjelmoitu pyörittää spinneriä molempiin suuntiin, ilman moottorijarrua.
– Vastaanotin FrSky RX4R
– 25V 470uF konkka päävirtalinjassa ottaa vastaan virtapiikit, ettei vastaanotin sammu spinnerin iskusta.
– 2S 450mAh Tattu lipo
– XT30 virtaliitin 30A
– Fingertech ruuvivirtakytkin
– Spinnerin moottori Brotherhobby R2 2205 2600KV
– Hardox 400 laserleikattu 200mm spinneri, 120g
– Silikonirenkaat on tehty kylppärisilikonilla 3d-printattuun muottiin. Renkaisen akselina M3 ruuvi.
Ee-Roottorin osalista tälläkertaa PDF muodossa
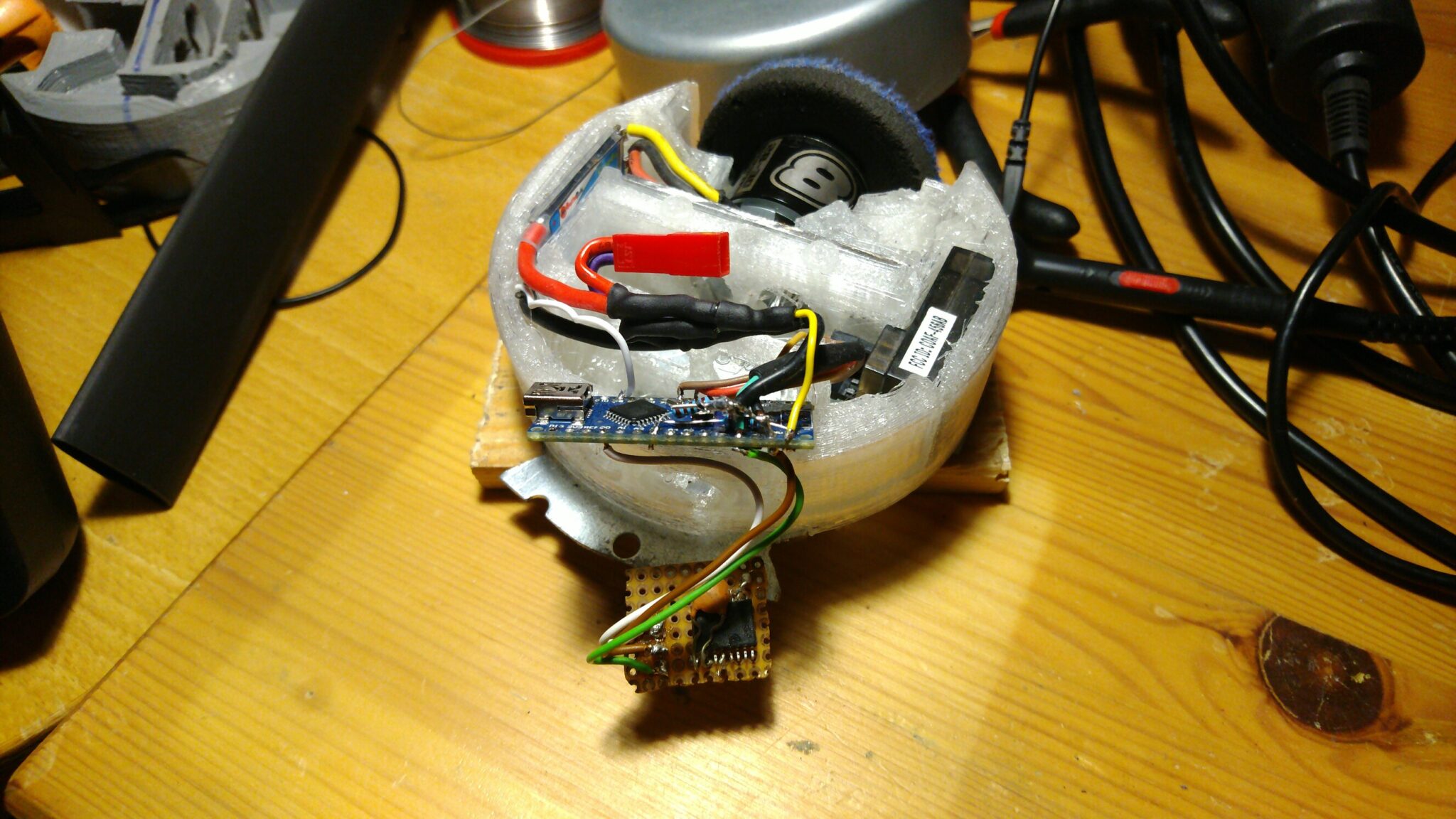
Kattila 450g
– 138g naulauslevyistä hitsattu ja hiottu pohjarakenne johon moottori, sisärunko ja kansi kiinnittyy ja johon on integroitu ”terä” jolla törmäillään vastustajaan ja areenan seiniin. Tämä kappale on muotoiltu siten että dynaaminen tasapaino toteutuu.
– 93g TPU:sta 3D-tulostettu sisärunko joka pitää osat joustavasti (eli ehjinä) paikoillaan, varmistaa oikean painopisteen, keskittää kannen ja antaa vastustajalle ”lihaa” syötäväksi. Osat sijoittuu tämän avulla siten että dynaaminen tasapaino toteutuu.
– 59g teräksisestä ilmastointiputken tulpasta sahattu ja porattu pyöreä kansi joka pitää omalta osaltaan sisuskalut robon sisällä ja estää terien pääsyn liian syvälle sisuskaluihin. Antaa myös laitteelle nimen mukaisen ulkonäön.
– 3S 450mAh turnigy nano-tech akku
– TGY-5RX vastari ja sopiva lähetin. Halvinta kiinanroskaa mitä saa, mutta toimii äärimmäisen hyvin. Tätä ei näköjään ole enää myytävänä, mallisarjat päivittyneet jo.
– Turnigy 28-30 750KV moottori. Monta vuotta vanha malli, ei taida olla enää saatavilla.
– Joku BLHeli-pohjainen nopeudensäädin, enemmän tai vähemmän ylimitoitettu ja en ylläty jos tätä samaa mallia ei enää saa mistään.
– Arduino Nano -kiinaklooni
– Analoginen 250g kiihtyvyysanturipiiri juotettuna konkan kera reikälevylle. Joku täysin obsolete malli jonka ostin tukkurilta joskus viime vuosikymmenellä. Vai toissavuosikymmenellä?
– Valkoinen teholedi jota Nano ohjaa jonkun bc547 perustransistorin avulla.
– Pyöreäksi leikattu pala jotain 90-luvun hiirimattoa toimittaa renkaan virkaa
– Pala piirilevyä pitää hiirimaton palan paikoillaan ja muodossaan moottorin päädyssä.
Rakennuspäiväkirja: https://robosota.fi/topic/team-c55-robotit/#post-490
Oletko innokas liittymään mukaan toimintamme vapaaehtoiseen ylläpitämiseen?
Yhdistys kaipaa riveihinsä vapaaehtoisia työntekijöitä pyörittämään toimintaa turnauksissa.
contact@robosota.fi
Liity postituslistalle ja saa ajankohtaista tietoa kilpailuista ja toiminnastamme:
[newsletter_form button_label="Liity"]
[newsletter_field name="email" label="" placeholder="email"]
[/newsletter_form]
© Robosota Ry - Visuaalisen ilmeen, sisällön ja verkkosivujen toteutus: Ville Ollila - Bannerien valokuvat: Juha Luoma